O Nosso Robot
Deverá ser capaz de:
- Movimentar-se de forma autónoma;
- Evitar obstáculos;
- Seguir uma linha de largura e cor específicas no chão;
- Identificar cores no chão, executando certas tarefas, dependendo das mesmas;
- “Pegar”, “largar” e transportar pequenos objectos de tamanho e forma específicos;
- Indicar o seu estado, através de luzes indicadoras ou equivalente.
Características gerais da estrutura:
- Flexibilidade em termos de montagem, ou seja, a posição dos componentes deverá poder ser facilmente alterada, se necessário;
- A montagem dos componentes na estrutura deverá permitir que estes sejam facilmente desmontados, sem danos para os mesmos;
- O centro de massa deverá estar próximo do eixo de rotação das rodas de tracção, bem como do próprio robot (quando vira), tendo em conta o peso dos componentes que estão mais à frente, bem como o objecto que pode ser transportado, de maneira a manter o robot equilibrado e evitar sobrecarregar os roll-on (ou equivalente, que seja omnidireccional) da frente, que não darão tracção, e assim melhorar o desempenho se o piso tiver pequenas irregularidades;
- Os componentes centrais relacionados com a programação ou alimentação do robot (como a placa Arduino e as pilhas) deverão ser de fácil acesso. Idealmente, o robot deverá poder ser programado sem que nenhum dos seus componentes tenha de ser removido – por isso a entrada USB da placa (ou extensão da mesma) deverá poder ser acedida a partir do exterior.
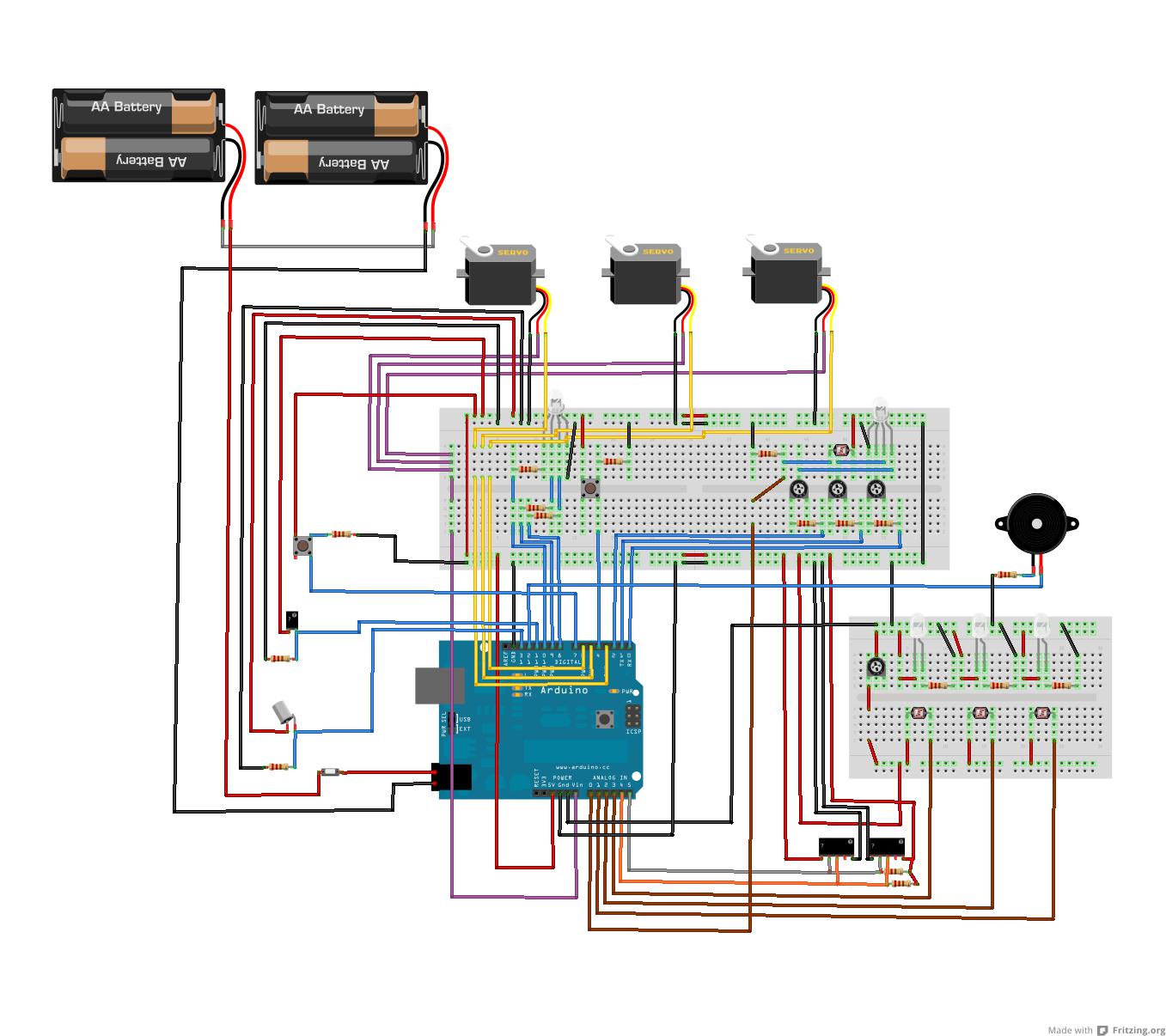
Esquema dos circuitos do Robot
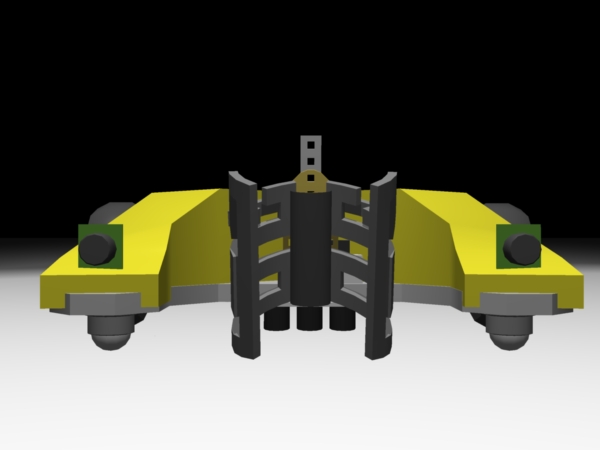
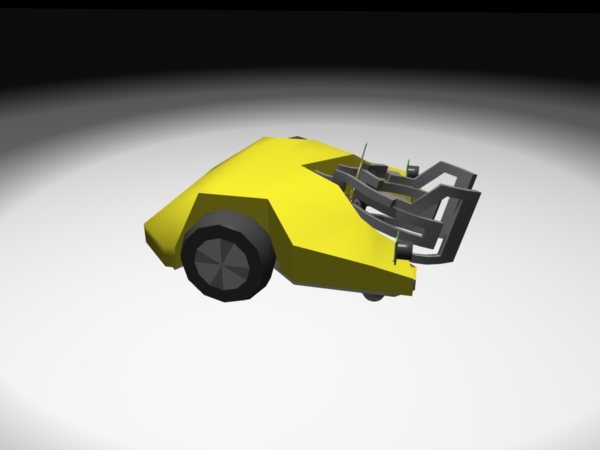
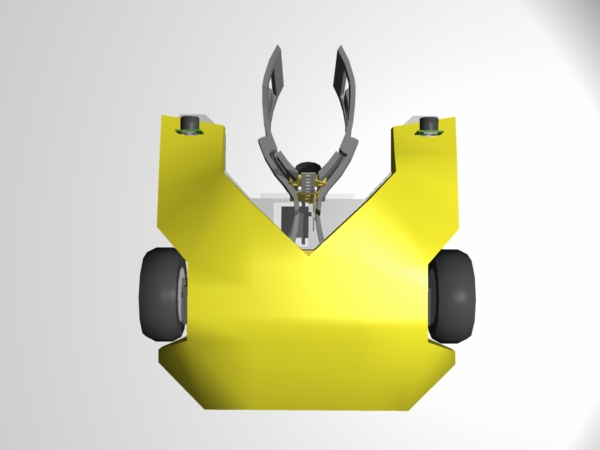
Imagens do protótipo
Estrutura:
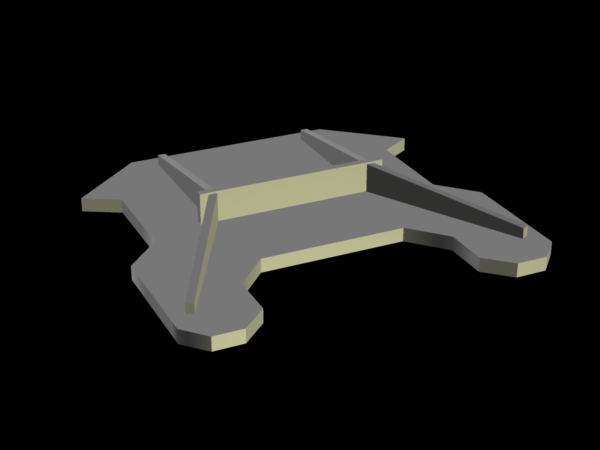
Topo:
Fundo:
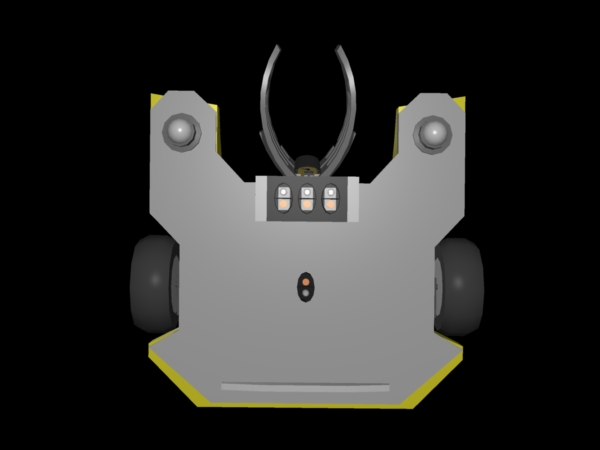
Frente: